python
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.colors as colors
import math
import torch
import torchlensmaker as tlm
from torch.nn.functional import normalize
from torchlensmaker.core.collision_detection import Newton, GD, LM, CollisionMethod
from torchlensmaker.testing.collision_datasets import CollisionDataset
from torchlensmaker.testing.dataset_view import dataset_view
from torchlensmaker.core.geometry import unit3d_rot
from torchlensmaker.core.cylinder_collision import rays_cylinder_collision, rays_rectangle_collision
import matplotlib as mpl
from IPython.display import display, HTML
from typing import TypeAlias
Tensor: TypeAlias = torch.Tensor
def analysis_single_ray(surface, P, V):
dim = P.shape[0]
P, V = P.unsqueeze(0), V.unsqueeze(0)
dataset_view(surface, P, V, rays_length=100)
xmin, xmax, tau = surface.bcyl().unbind()
if dim == 3:
tmin, tmax, hit_mask = rays_cylinder_collision(P, V, xmin, xmax, tau)
else:
tmin, tmax, hit_mask = rays_rectangle_collision(P, V, xmin, xmax, -tau, tau)
assert torch.all(hit_mask)
results = surface.collision_method(surface, P, V, tmin, tmax, history=True)
t_solve, t_history = results.t, results.history_fine
t_min = t_history.min().item()
t_max = t_history.max().item()
N = 1000
H = t_history.size(1)
tspace = torch.linspace(t_min - (t_max - t_min), t_max + (t_max - t_min), N)
# t plot
tpoints = P.expand((N, dim)) + tspace.unsqueeze(1).expand((N, dim)) * V.expand((N, dim))
Q = surface.Fd(tpoints)
Qgrad = torch.sum(surface.Fd_grad(tpoints) * V, dim=1)
assert tpoints.size() == (N, dim)
assert Q.size() == (N,)
assert Qgrad.size() == (N,)
assert t_history.size() == (1, H)
assert t_solve.size() == (1,)
points_history = P + t_history[0, :].unsqueeze(1).expand((-1, dim)) * V
assert points_history.size() == (H, dim), points_history.size()
final_point = (P + t_solve.unsqueeze(0).expand(-1, dim) * V).squeeze(0)
assert final_point.size() == (dim,)
fig, axes = plt.subplots(2, 1, figsize=(10, 5))
fig.tight_layout(pad=3, w_pad=1.8, h_pad=3)
ax_t, ax_iter = axes
# t plot: plot Q and Q grad
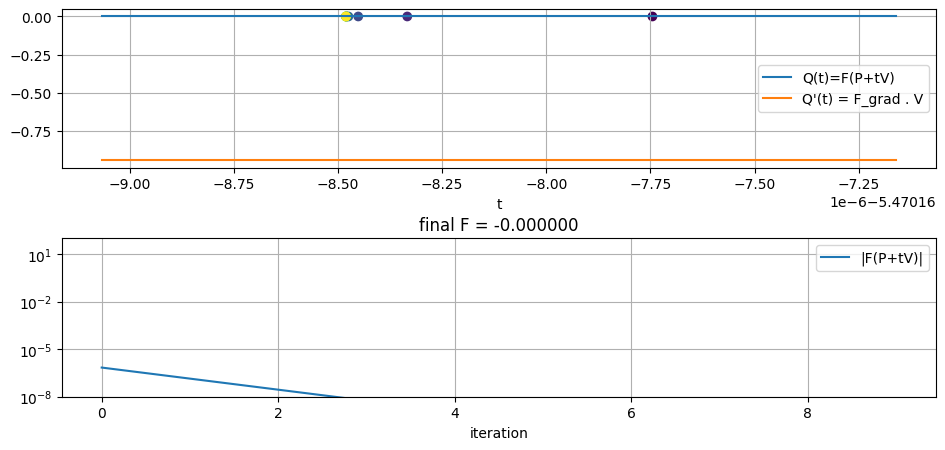
ax_t.plot(tspace.detach().numpy(), Q.detach().numpy(), label="Q(t)=F(P+tV)")
ax_t.plot(tspace.detach().numpy(), Qgrad.detach().numpy(), label="Q'(t) = F_grad . V")
ax_t.grid()
ax_t.set_xlabel("t")
ax_t.legend()
F_history = surface.Fd(points_history)
print(F_history)
# t plot: plot t history
ax_t.scatter(t_history[0, :], F_history, c=range(t_history.shape[1]), cmap="viridis", marker="o")
# History plot: plot F
ax_iter.plot(range(t_history.shape[1]), torch.abs(F_history), label="|F(P+tV)|")
ax_iter.legend()
ax_iter.set_xlabel("iteration")
ax_iter.set_title(f"final F = {surface.Fd(final_point.unsqueeze(0))[0].item():.6f}")
ax_iter.set_yscale("log")
ax_iter.grid()
ax_iter.set_ylim([1e-8, 100])
#fig.suptitle(surface.testname() + " " + str(surface.collision_method))
plt.show(fig)
display(HTML("<hr/>"))
# 3D baby!
analysis_single_ray(tlm.Sphere(30, R=20),
P=torch.tensor([5.0, 1.0, 2.0], dtype=torch.float64),
V=unit3d_rot(15.0, 35.0, dtype=torch.float64))tensor([-6.9558e-07, -1.3912e-07, -2.7823e-08, -5.5646e-09, -1.1129e-09,
-2.2259e-10, -4.4517e-11, -8.9034e-12, -1.7809e-12, -3.5572e-13],
dtype=torch.float64)